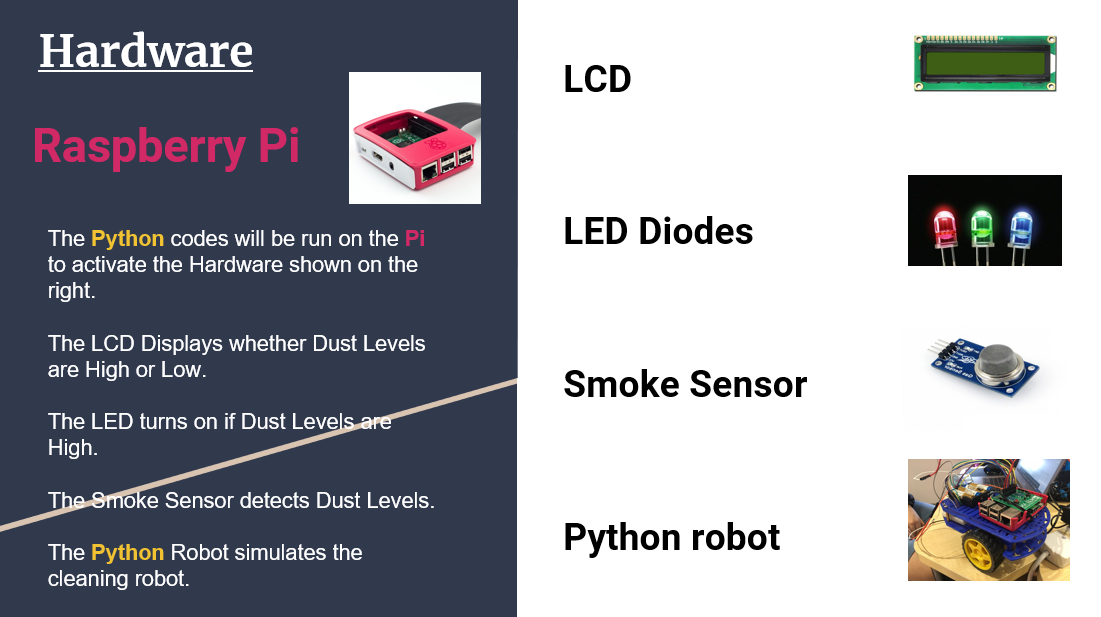
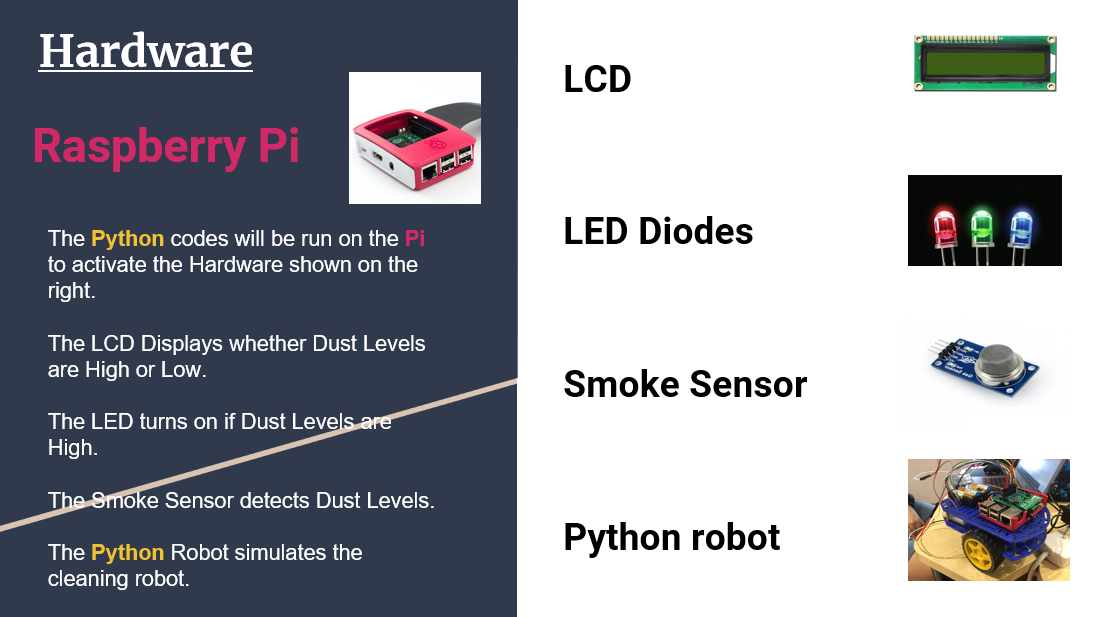
Resources Involved
System Diagram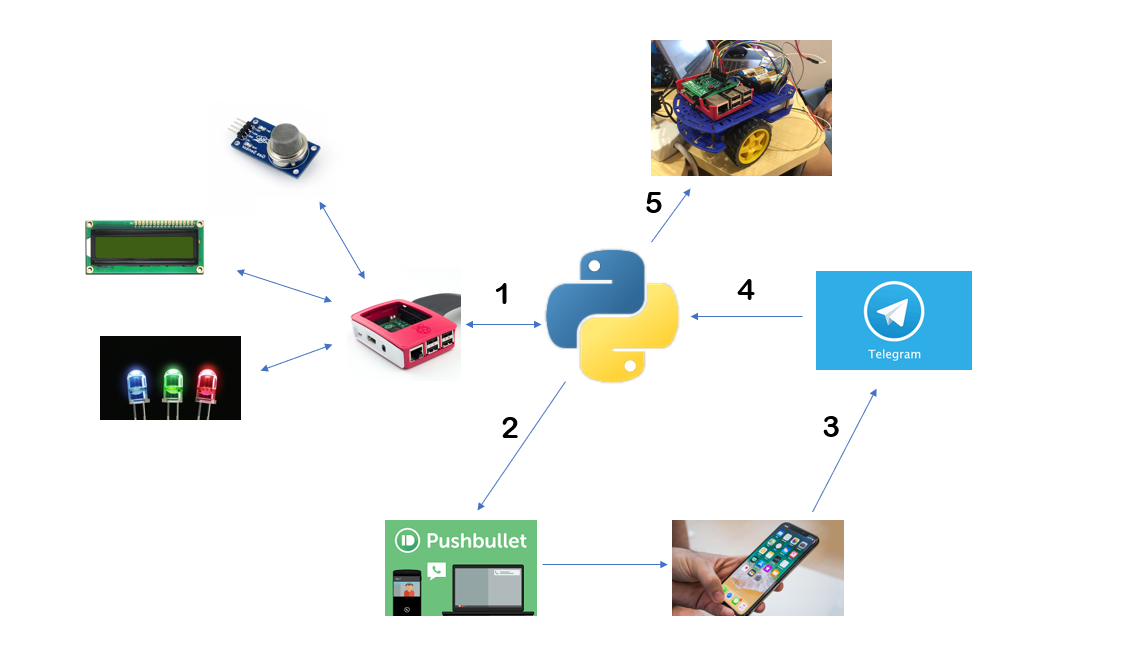 Processes: 1. A Python Code is implemented to run the three components, Smoke Sensor, LED Diodes and LCD Display which work together to detect dust levels. 2. Once dust levels reach a certain level, Python will send a PushBullet notification to the user's smart phone. 3. The user will then be prompted to use Telegram to send a command to the Telegram Bot. 4. Once the command has been sent to the Telegram Bot, the Telegram Bot will trigger a Python Code. 5. The Python code which triggers the Robot to move simulates the signal has been sent to the cleaning robot. Video
0 Comments
We inserted the code which makes the robot move into the code for the Telegram Bot to run. The program ran perfectly fine and we got the robot to move after a message was sent using Telegram. The next issue was that the breadboard which we used to connect our wires was way too bulky if we are to showcase the robot moving on the ground. Therefore, we are removing the breadboard and connecting the wires directly to the Raspberry Pi itself. We will use blue tack to stick parts if needed
Python Code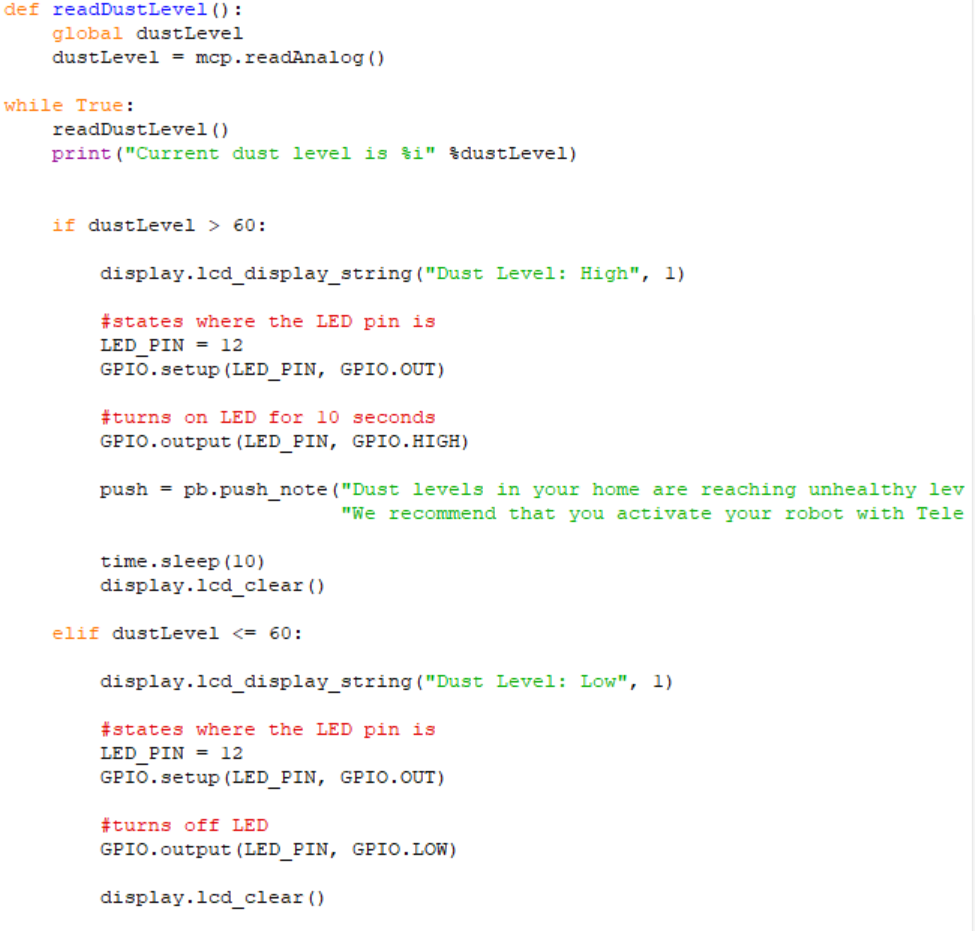 We have updated and tested the Dust Detection code this week. The PushBullet is sent successfully, the LCD displays the Dust Level and the LED lights up when Dust Levels are at a certain point. We have also managed to get the Telegram bot to send a signal back to us. By next week, we should get the Telegram Bot to run a python program to make the Robot we received move.
The PiWe have managed to get the python code I have displayed in Post 2 to work on the Pi. We also tested the Telegram Bot on the Pi and it turned out fine. We then decided to get the Telegram Bot to run the Python Code on the Pi. To do so, we had to install Telegram on the Pi, while doing so we ran into technical difficulties, hence we did not make as much progress as I hoped we could have. We finally got it to work nearing the end of the week and managed to get both codes back into the Pi as well as get them to run on the Pi again.
Our next goal is to put both codes together and get the second half of our project done. The second half includes getting the user to send a command prompt back to the Telegram Bot to get it to start the robot that was handed to us. IFTTTWe realised that IFTTT does not provide everything we need to get our project to work, therefore we are not going to continue using IFTTT for now. If we see the need to, we may revisit it but as of now, we will not be making use of IFTTT Python Code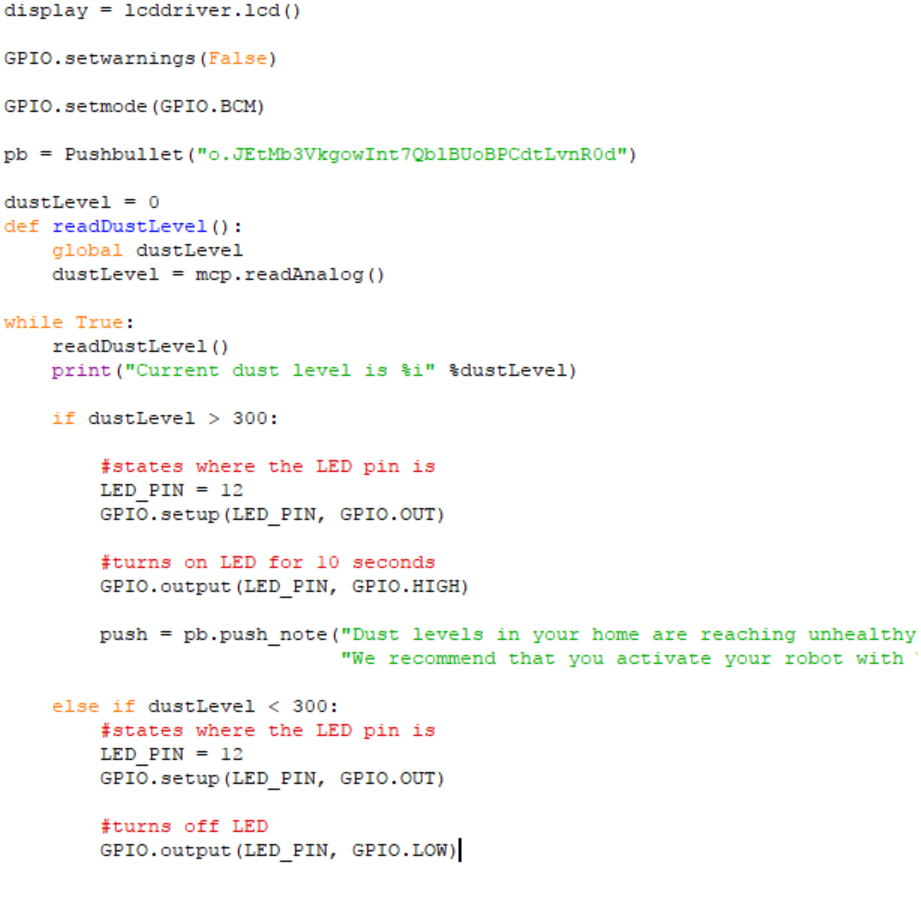 I have managed to put together the different things we learnt to make the first part of our program. We plan to test the code next week and make any adjustments required. It includes detecting the dust levels and if it reaches a certain point, an LED will be turned on to indicate the dust levels are unhealthy. A PushBullet notification will also be sent to the user. When dust levels go back to healthy levels, the LED will be turned off so the user knows that the environment is now back to normal.
Home and EnvironmentFor our Portfolio Assignment this Semester, we are planning to tackle the cleanliness of households. Using a sensor to detect dust in different locations of a house and record it down. At certain levels that may be health hazardous to people, a notification would be sent through PushBullet. We are looking to allow the user to choose to activate a Robot which would automatically clean the house. If PushBullet does not work, we are going to try and use IFTTT to connect the Robot that my partner will be providing. PushBullet This application allows us to send messages using Python to any device that has the PushBullet application installed on it. Once the dust levels reach a certain level, we will send a notification to the user's device.  Python This is what we will base our code on to send the notification to the user. IFTTT This application is the other application that we will use in the event that PushBullet does not work the way we want it to. |
|||||||